b) Mengaplikasikan protokol komunikasi UART, SPI, dan I2C pada Arduino
a) Modul Arduino
b) Push Button
c) LED
A.Universal Asynchronous Receiver Transmitter (UART)

B. Serial Peripheral Interface (SPI)



Microcontroller ATmega328P |
Operating Voltage 5 V |
Input Voltage (recommended) 7 – 12 V |
Input Voltage (limit) 6 – 20 V |
Digital I/O Pins 14 (of which 6 provide PWM output) |
PWM Digital I/O Pins 6 |
Analog Input Pins 6 |
DC Current per I/O Pin 20 mA |
DC Current for 3.3V Pin 50 mA |
Flash Memory 32 KB of which 0.5 KB used by bootloader |
SRAM 2 KB |
EEPROM 1 KB |
Clock Speed 16 MHz |
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino.
Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
Digunakan untuk mengulang program Arduino dari awal atau Reset.
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.

Push button sering digunakan didalam dunia perindustrian. Alat ini sering digunakan untuk mengoperasikan mesin - mesin industri. Berdasarkan titik kontaknya, push button dibedakan menjadi tiga macam, yaitu ;
- Titik kontak NO (Normaly Open),
- Titik kontak NC ( Normaly Close ),
- Titik kontak NO dan NC.
- NO (Normally Open), merupakan kontak terminal dimana kondisi normalnya terbuka (aliran arus listrik tidak mengalir). Dan ketika tombol saklar ditekan, kontak yang NO ini akan menjadi menutup (Close) dan mengalirkan atau menghubungkan arus listrik. Kontak NO digunakan sebagai penghubung atau menyalakan sistem circuit (Push Button ON).
- NC (Normally Close), merupakan kontak terminal dimana kondisi normalnya tertutup (mengalirkan arus litrik). Dan ketika tombol saklar push button ditekan, kontak NC ini akan menjadi membuka (Open), sehingga memutus aliran arus listrik. Kontak NC digunakan sebagai pemutus atau mematikan sistem circuit (Push Button Off).


Motor Listrik DC atau DC Motor ini menghasilkan sejumlah putaran per menit atau biasanya dikenal dengan istilah RPM (Revolutions per minute) dan dapat dibuat berputar searah jarum jam maupun berlawanan arah jarum jam apabila polaritas listrik yang diberikan pada Motor DC tersebut dibalikan. Motor Listrik DC tersedia dalam berbagai ukuran rpm dan bentuk. Kebanyakan Motor Listrik DC memberikan kecepatan rotasi sekitar 3000 rpm hingga 8000 rpm dengan tegangan operasional dari 1,5V hingga 24V. Apabile tegangan yang diberikan ke Motor Listrik DC lebih rendah dari tegangan operasionalnya maka akan dapat memperlambat rotasi motor DC tersebut sedangkan tegangan yang lebih tinggi dari tegangan operasional akan membuat rotasi motor DC menjadi lebih cepat. Namun ketika tegangan yang diberikan ke Motor DC tersebut turun menjadi dibawah 50% dari tegangan operasional yang ditentukan maka Motor DC tersebut tidak dapat berputar atau terhenti. Sebaliknya, jika tegangan yang diberikan ke Motor DC tersebut lebih tinggi sekitar 30% dari tegangan operasional yang ditentukan, maka motor DC tersebut akan menjadi sangat panas dan akhirnya akan menjadi rusak.
Pada saat Motor listrik DC berputar tanpa beban, hanya sedikit arus listrik atau daya yang digunakannya, namun pada saat diberikan beban, jumlah arus yang digunakan akan meningkat hingga ratusan persen bahkan hingga 1000% atau lebih (tergantung jenis beban yang diberikan). Oleh karena itu, produsen Motor DC biasanya akan mencantumkan Stall Current pada Motor DC. Stall Current adalah arus pada saat poros motor berhenti karena mengalami beban maksimal.
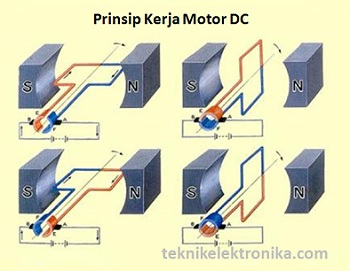
Prinsip Kerja Motor DC
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), Armature Winding (Kumparan Jangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.
{kind=link}

Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
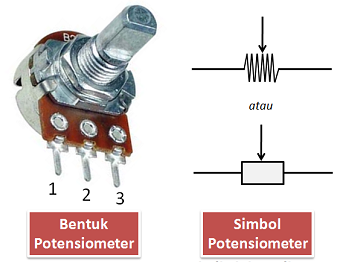
Prinsip Kerja (Cara Kerja) Potensiometer
Sebuah Potensiometer (POT) terdiri dari sebuah elemen resistif yang membentuk jalur (track) dengan terminal di kedua ujungnya. Sedangkan terminal lainnya (biasanya berada di tengah) adalah Penyapu (Wiper) yang dipergunakan untuk menentukan pergerakan pada jalur elemen resistif (Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif inilah yang mengatur naik-turunnya Nilai Resistansi sebuah Potensiometer.
Elemen Resistif pada Potensiometer umumnya terbuat dari bahan campuran Metal (logam) dan Keramik ataupun Bahan Karbon (Carbon).
Berdasarkan Track (jalur) elemen resistif-nya, Potensiometer dapat digolongkan menjadi 2 jenis yaitu Potensiometer Linear (Linear Potentiometer) dan Potensiometer Logaritmik (Logarithmic Potentiometer).

No comments:
Post a Comment