Referensi :
1. Tujuan
[back]
a. Mahasiswa mampu memahami konsep dasar Fuzzy Kontrol Sistem
b. Mahasiswa mampu merancang Robotic Arm dengan fuzzy
2. Alat dan Bahan
[back]
Alat yang dibutuhkan pada pembelajaran ini yaitu software MATLAB

MATLAB merupakan bahasa pemrograman tingkat
tinggi yang dikembangkan oleh MathWorks dan dikhususkan untuk komputasi
numerik, visualisasi, dan pemrograman.
Tampilan MATLAB:
V.

Manipulator robot adalah sistem mekanis yang terdiri dari beberapa tautan terhubung dalam konfigurasi rantai, dengan derajat kebebasan rotasi pada masing-masing joint (hubungan antara dua link). Sistem ini digunakan di tempat yang sama berfungsi sebagai lengan manusia dan oleh karena itu kadang-kadang disebut sebagai lengan mekanik. Persamaan gerak untuk sistem manipulator robot ini adalah sangat nonlinier. Pengontrol nonlinier untuk sistem jenis ini biasanya sulit untuk dirancang, terlalu rumit untuk implementasi praktis, atau tidak cukup kuat untuk mentolerir kesalahan dalam asumsi.
berikut merupakan gambaran lengan robot untuk membuat matriks homogen 3x3

A. Fuzzy Modeling of a 2-Link Planar Manipulator
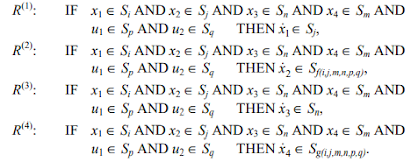
Manipulator planar 2-link akan diwakili oleh model dengan empat variabel keadaan: x1 (perpindahan sudut pada sambungan 1), x2 (kecepatan sudut pada sambungan 1), x3 (perpindahan sudut pada sambungan 2), dan x4 (kecepatan sudut pada sambungan 2). Dua input kontrol adalah u1 (torsi dikirim ke sambungan 1 dengan mekanisme servo), dan u2 (torsi dikirim ke sambungan 2 dengan mekanisme servo lain). Dengan notasi tersebeut dapat dibuat rules untuk fuzzy logicnya sebagai berikut :
Kontroler fuzzy dari manipulator planar 2-link dapat
dirancang berdasarkan pembaruan model fuzzynya. Ada dua cara untuk memperbarui
parameter model fuzzy: (i) menggunakan persamaan gerak sebagai pedoman untuk
menghitung parameter menggunakan ekspansi deret Taylor terpotong, dan (ii)
menggunakan data yang diamati dan algoritma kurva-fitting untuk memperkirakan
parameter. Setelah parameter diperbarui, pengontrol dapat ditentukan secara
sistematis berdasarkan parameter yang baru diperbarui ini.
Metode decoupling bekerja dengan cara yang sama: parameter
dari setiap sistem yang dipisahkan diperbarui baik menggunakan persamaan gerak
atau penyesuaian kurva. Namun, sistem jauh lebih sensitif karena sering
memerlukan pembaruan pada frekuensi yang jauh lebih cepat (yaitu, interval
antara dua tindakan operasi harus cukup pendek) untuk menghindari penyimpangan
No comments:
Post a Comment